Foto: GRSE Indijska mornarica uvela je 28. ožujka u Port Blairu u operativnu uporabu prvo…
Autonomno podvodno plovilo SeaOtter
Predviđajući nagli porast zanimanja za autonomna podvodna plovila tvrtka Atlas Elektronik je razvila dva demonstratora tehnologije – SeaOtter Mk I i SeaOtter Mk II
 I dok se razvoj bespilotnih letjelica namijenjenih izvidničkim i borbenim zadaćama odvija velikom brzinom, razvoj autonomnih podvodnih plovila još je uvijek na samom početku. To je čudno jer je već duže vrijeme dostupna potrebna računalna i programska potpora potrebna za izgradnju takvih plovila, a potreba za njihovom uporabom jednako je velika (ako ne i veća) nego uporaba bespilotnih letjelica. Autonomno podvodno plovila je bez ljudske posade i s vlastitim pogonom koje nije nikakvom čvrstom vezom (kablom) povezano s drugim plovilom. Ono je sposobno za samostalno djelovanje bez podrške s površinskog ili podvodnog plovila uz minimalnu tehničku i logističku podršku u kratkom vremenu priprema za zadaću. Ova vrsta plovila morala bi djelovati u područjima (zbog konfiguracije dna ili potrebe tajnog djelovanja) u kojima je nemoguće uporabiti daljinski upravljana plovila. To će od autonomnih podvodnih plovila učiniti vrlo vrijedno oružje podvodnog ratovanja.
I dok se razvoj bespilotnih letjelica namijenjenih izvidničkim i borbenim zadaćama odvija velikom brzinom, razvoj autonomnih podvodnih plovila još je uvijek na samom početku. To je čudno jer je već duže vrijeme dostupna potrebna računalna i programska potpora potrebna za izgradnju takvih plovila, a potreba za njihovom uporabom jednako je velika (ako ne i veća) nego uporaba bespilotnih letjelica. Autonomno podvodno plovila je bez ljudske posade i s vlastitim pogonom koje nije nikakvom čvrstom vezom (kablom) povezano s drugim plovilom. Ono je sposobno za samostalno djelovanje bez podrške s površinskog ili podvodnog plovila uz minimalnu tehničku i logističku podršku u kratkom vremenu priprema za zadaću. Ova vrsta plovila morala bi djelovati u područjima (zbog konfiguracije dna ili potrebe tajnog djelovanja) u kojima je nemoguće uporabiti daljinski upravljana plovila. To će od autonomnih podvodnih plovila učiniti vrlo vrijedno oružje podvodnog ratovanja.
Jedan od pokušaja pokretanja razvoja autonomnog podvodnog plovila (Autonomous Underwater Vehicle – AUV) je Sea Otter Mk II tvrtke Atlas Elektronik iz Bremena (Njemačka). SeaOtter Mk II nastao je na osnovama plovila-demonstratora tehnologija SeaOtter Mk I. Ako ne bude većih problema u razvoju, SeaOtter Mk II prvi će put zaploviti potkraj ove godine. Ispitivanje plovila odvijat će se u Eckernförde i Olpenitz središtima za obuku na njemačkoj baltičkoj obali.
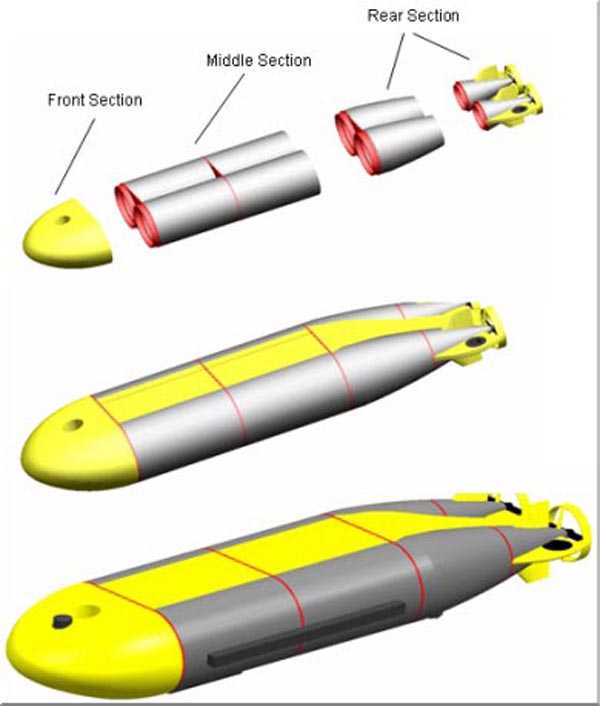
Prema izvorima s vrha Atlas Elektronik dva SeaOtter Mk II plovila grade se u sklopu ugovora vrijednog 3,5 milijuna eura koji je 2005. tvrtka dobila od njemačke BWB agencije za vojni razvoj. Atlas Elektronik je u razvoj SeaOtter Mk II plovila uložio otprilike isti iznos svog novca. Plovila su trenutačno u gradnji u pogonu Atlas Maridan u Horsholmu (Danska). Ovaj pogon zapošljava samo 11 radnika i smješten je 50 kilometara sjeverno od Kopenhagena. Atlas Elektronik očekuje, zbog sudjelovanja Maridana u razvoju i gradnji SeaOtter plovila, da će se u cijeli projekt s vremenom uključiti i danska ratna mornarica. Dva će Sea Ottera Mk II proći seriju ispitivanja namijenjenih za provjeru koncepcije modularnog plovila koja obuhvaća standardnu pramčanu i krmenu sekciju. Između se nalazi modularna sekcija prilagođena ugradnji širokog spektra senzora, komunikacijske opreme, navigacijskih i pogonskih sustava. Od sredine 2007. za testiranje će biti dostupan novi višeimpulsni/višenamjenski bočno motreći sonar kojeg razvija Atlas Elektronik. Novi sonar, koji ima po jedan vučni niz senzora na svakom boku plovila, imat će synthetic aperture sonas (SAS) koji je posebno projektiran za što učinkovitije otkrivanje i identifikaciju morskih mina koje leže na dnu mora. Uz to će SeaOttera Mk II opremiti i višefrekventnim ekosonderom koji će znatno povećati preciznost detekcije otkrivenih predmeta.
Atlas Elektronik od projekta razvoja SeaOtter Mk II plovila očekuje da će doći na sam vrh ponuđača tehnologija potrebnih za proizvodnju autonomnih podvodnih plovila. Tvrtka očekuje da će se tržište AUV-a uskoro znatno povećati jer će ratne mornarice, potaknute uspjehom bespilotnih letjelica, okrenuti razvoju i/ili kupnji autonomnih plovila.
Jedna od najvažnijih zadaća AUV-a bit će protuminska borba, bilo da djeluju s namjenskih plovila ili drugih ratnih brodova, pa čak i s nenamjenskih brodova kao što su ribarice. Teoretski je moguća i uporaba iz zraka izbacivanjem iz helikoptera koji lebde na vrlo maloj visini. Druge zadaće AUV-a mogle bi biti protupodmornička borba, izviđanje, nadgledanje i identifikacija, pomoć u operacijama spašavanja, borba protiv terorizma i zaštita snaga, zaštita plovnih i fiksnih objekata te pomoć specijalnim snagama.
Komercijalna osnova
Kao osnova za razvoj AUV-a SeaOtter Mk I uporabljen je Maridan 600, uspješno komercijalno podvodno plovilo koje je prodano u više tvrtki specijaliziranih za podvodna istraživanja i radove na vađenju rudača, plina i nafte s morskog dna. Maridan 600 se uspješno rabi u vodama Meksičkog zaljeva, Grenlanda (uključujući i operacije pod ledom) i Južne Afrike. U usporedbi s Maridanom 600 SeaOtter Mk I je dobio bolju navigacijsku i upravljačku opremu koja mu omogućava izbjegavanje objekata uz zadržavanje prije utvrđenog kursa plovidbe.
Takozvani faltfish hidrodinamički oblik odabran je kako bi se povećala stabilnost i pokretljivost plovila. Stabilnost plovidbe povećala je učinkovitost ugrađenih senzora, posebno njihovu preciznost prilikom mapiranja terena nad kojim je se plovilo kretalo. Takav oblik SeaOttera daleko je primjereniji za protuminske zadaće nego, recimo, valjkasti oblik torpeda. Naime, torpedo nema dobru pokretljivost pri maloj brzini i ne može plutati i voziti vrlo malom brzinom, što je pak potrebna sposobnost za plovilo namijenjeno protuminskim zadaćama.
Druge prednosti flatfish oblika su smanjenje potrebne snage pogonskog sustava te istodobno povećanje iskoristivog prostora za ugradnju potrebnih senzora. Zbog toga je, iako nije standardni oblik za AUV-e, flatfish najbolji hidrodinamički oblik najbolji za veliku većinu zadaća. Istodobno Atlas Elektronik nastavlja promociju svojeg daljinski upravljivog plovila koje je nastalo na osnovi teškog torpeda DM24A i koje se može lansirati iz torpednih cijevi podmornica. Postoje specifične zadaće koje zahtijevaju od AUV-a vrlo veliku brzinu plovidbe (kao što je izviđanje) zbog čega oblik torpeda ima svoje opravdanje. Obitelj plovila SeaOtter bit će prethodnica Atlas Elektronikovih napora u razvoju operativnih autonomnih podvodnih plovila, posebice nakon što se SeaOtter Mk I dokazao tijekom serije ispitivanja i testiranja koja su obavljena u Njemačkoj ali i izvan nje. Uz to su, tijekom 2005., njegove mogućnosti demonstrirane u njemačkim, francuskim i talijanskim vodama.
Atlas Elektronik je, na tim osnovama, odlučio ponuditi SeaOtter Mk I kao novo napredno sredstvo za borbu protiv protubrodskih mina. Neka iskustva na tom području već su prikupljena tijekom demonstracije mogućnosti Maridana 600 u svojstvu plovila za traganje za minama koje je tvrtka DeBeers Marine održala južnoafričkoj ratnoj mornarici. Demonstracija je obuhvatila zaranjanje plovila još u luci, autonomnu plovidbu do minskog polja i povratak u luku nakon obavljene misije otkrivanja zaronjenih mina. Operativne mogućnosti samog SeaOttera Mk I demonstrirane su tijekom 2003. na jednom od lovaca mina tipa Stanflex 300 danske ratne mornarice. Nova serija demonstriranja mogućnosti počela je u siječnju 2005. kad je SeaOtter Mk I postavljen na njemački lovac mina tipa MJ 332. Plovilo je postavljeno na brod i spuštano u vodu pomoću kolijevke i dizalice koje se rabe u sustavu daljinski upravljive ronilice Pinguin B3 koju također proizvodi Atlas Elektronik. Ispitivanja uporabljivosti na moru počela su u svibnju 2005. na lovcu mina FGS Weilheim (M 1059) s naglaskom dokazivanja uporabljivosti sustava SeaOtter Mk I unutar već raspoloživih sustava ugrađenih na minolovac. Posebna je pozornost posvećena mogućnosti zajedničkog djelovanja plovila SeaOtter Mk I i plovila SeaFox (koje također proizvodi Atlas Elekronik) koje je namijenjeno otkrivanju zaronjenih mina. Uz to SeaOtter Mk I je morao dokazati da se može uklopiti u postojeće brodske sustave za planiranje i kontrolu zadaća. Na taj je način u praksi ne samo potvrđena mogućnost zajedničkog djelovanja sustava SeaOtter Mk I i SeaFox već i znatno povećanje sposobnosti izvršavanja zadaća tradicionalnog lova mina. SeaOtter Mk I je potvrdio da je dovoljno prilagodljiv i samostalan u djelovanju, te se može uporabiti s praktički svakog broda koji je dovoljno velik nositi ga i opremljen je odgovarajućom dizalicom. Testiranja obavljena u priobalju pokazala su da SeaOtter Mk I može djelovati i s mola bez matičnog broda.
Podjednako važno, barem po tvrdnjama Atlas Elektronika, je i da je uvezivanje SeaOtter Mk I sustava u brodski sustav, uključujući i povezivanje s brodskim sonarom kojim je praćenja ronilica SeaFox, obavljeno u samo dva dana.
Cijeli proces ispitivanja podijelili su u tri zasebne cjeline (faze). Prva faza obavljena je u svibnju 2005. i obuhvatila je otkrivanje i detekciju mina. Vježba se odvijala u pomorskoj bazi Olpenitz i tri nautičke milje udaljenom vježbovnom području Schönhagen. Za dva sata i petnaest minuta, koliko je vježba trajala, plovilo SeaOtter Mk I, ekosonder Reson 8125, bočno motrilački sonar Klein 2000 morali su otkriti i detektirati mine, kako one ležeće na dnu (švedska Rockan) tako i sidrene. Druge su zadaće obuhvatile premještanje, identifikaciju i određivanje razmještaja pomoću ronilice SeaFox. Obavljeno je i mapiranje morskog dna pomoću svih dostupnih senzora kao dio rutinske zadaće pregleda. Nakon toga su uspoređeni podaci dobiveni pomoću SeaOtter Mk I plovila i podaci dobiveni od Wilheimovog u trupu ugrađenog sonara za otkrivanje mina. Po tvrdnjama Atlas Elektronika posada Wilheima je već nakon prvog dana otkrila da njihov brod može obavljati nešto drugo dok je SeaOtter pod vodom. Drugim riječima došlo je do znatnog povećanja mogućnosti djelovanja.
Druga je faza obavljena u lipnju 2005. i održana je u skopu eksperimentalne vježbe EXPLORA 2005. koja je održana u Francuskoj. Vježba je održana ispred pomorske baze u Brestu i zaljevu Douarnenez. U njoj je nekoliko brodova NATO članica demonstriralo svoje mogućnosti u obavljanju zadaća žurne ekološke zaštite, lovu mina i zaštite luka. Lovac mina Weilheim sudjelovao je u vježbi u istoj konfiguraciji kojom je djelovao i u svibnju tijekom ispitivanja SeaOttera Mk I, obavljajući zadaće lova mina kako bi pokazao učinkovitost kombinacije SeaOtter/SeaFox i dokazao kako se sustav može rabiti s bilo kojeg broda, ne samo namjenski opremljenog lovca mina. Tijekom EXPLORA, po tvrdnjama Atlas Elektronika, dokazano je da kombinacija SeaOtter/SeaFox uporabljiva u zadaćama lova mina i da se može rabiti s bilo kojeg broda odgovarajuće veličine. Da bi se svi sudionici u to uvjerili tim Atlas Elektronika je dobio površinu 1100 puta 450 metara u kojoj je, na nepoznatoj poziciji naravno, bila talijanska mina Manta. Njemački je tim dobio zadaću otkriti, klasificirati, identificirati i simulirati neutralizaciju mine bez ikakve pomoći s matičnog lovca mina. Ta je zadaća obavljena za otprilike tri sata, u kojih su uključeni 1,5 satna pretraga područja autonomnim podvodnim plovilom SeaOtter Mk I, obrada dobivenih podataka i pet minuta koliko je ronilici SeaFox trebalo da dođe do položaja mine i “uništi” je. Istodobno je iskorištena prilika za detaljni pregled terena koji sadrži tri različite brodske olupine. Ukupno je obavljeno dvanaest SeaOtter misija koje su trajale ukupno 7,5 sati, pri čemu je plovilo preplovilo 21,81 nautičku milju. Za sve to vrijeme SeaOtter je bio 100 posto uporabljiv.
Tijekom vježbe otkrivene su jedna Rockan mina, jedna kugla na dnu mora, sidrena mina, dva sidra i tri brodske olupine. Ronilica SeaFox obavila je šest misija sa stopostotnom učinkovitošću i stopostotnom uporabljivošću. Treća faza počela je u rujnu 2005. prikazom mogućnosti mobilnog priobalnog sustava namijenjenog protuminskoj borbi. Ta je faza obavljena u Olpenitzu u području namijenjenom isključivo za izvođenje mornaričkih vježbi. Po tvrdnjama Atlas Elektronika cilj treće faze bio je dokazati učinkovitost sustava u protuminskoj borbi iz pokretnog obalnog sustava koji je smješten u kontejner, bez potrebe da se pritom uporabi bilo koja vrsta broda. Djelovanje u plitkim obalnim vodama dokazalo je svu učinkovitost i preciznost navigacijskog sustava na SeaOtteru Mk I. Uz to je prikazana i pokretna inačica sustava SeaFox prilagođena uporabi s kamiona. Još važnije je da su oba sustava dokazala mogućnost djelovanja u jako plitkim vodama, što konkretno znači mogućnost sigurne plovidbe te otkrivanje mina i njihovo uništavanje bez potrebe sudjelovanja ronilaca. Pritom je dokazana sva prednost i fleksibilnost modularnog dizajna SeaOttera Mk I i Sea Foxa koji su se u vrlo kratkom vremenu mogli prilagoditi različitim zadaćama.
Zaštita snaga
Testiranja u vrlo plitkim vodama pokazala su još nešto – mogućnost uporabe SeaOttera Mk I u zadaćama zaštite snaga na otvorenom, u lukama i na obali. U to se ubrajaju i zadaće zaštite VIP osoba kad se kreću i zadržavaju u neposrednoj blizini mora. Tako je tijekom ispitivanja SeaOtter Mk I uspješno pregledao lukobran i sidrište pri čemu nije tražio klasične mine već ljude i različite eksplozivne naprave. Pritom je u većem broju slučajeva SeaOtter Mk I u more spuštan izravno s lukobrana tako da se je odmah našao u zoni djelovanja, što je znatno skraćivalo vrijeme operacije i povećavalo mogućnost brzog djelovanja u izvanrednim situacijama. Na taj su način pregledani lukobrani i drugi podvodni objekti u pomorskoj bazi Olpenitz te objekti u vježbovnom minskom polju u području Schönhagen.
Obradom svih podataka dobivenih nakon povratka SeaOttera Mk I lovac mina Weilheim je mogao doći u zonu djelovanja kako bi obavio otkrivanje, identifikaciju i (simuliranu) neutralizaciju svih kontakata koji su imalo sličili morskim minama. Pritom je rabljena ronilica SeaFox ali i druge ronilice koje se nalaze na Weilheimu.
Tijekom ispitivanja u Njemačkoj SeaOtter Mk I je porinut s mola i još dok je bio na površini mora pozicioniran je u sredinu unutarnjeg bazena luke iz kojeg je, po planu zadaće, plovilo moralo samo u zaronjenom stanju doploviti u područje vježbe na poligonu Schönhagen. Zadano je područje najčešće pretraživano u krivulji s 14 linija dužine 280 metara. Razmak između svake linije bio je oko 15 metara. Nakon obavljene zadaće SeaOtter Mk I se u zaronjenom stanju vratio do pozicije s koje je porinut u more, te je nakon toga u površinskoj vožnji preplovio još 20 metara do broda. Pod vodom je proveo 3,5 sata, bez izronjavanja i bez bilo kakve pomoći u navigaciji.
Nastavak testiranja
Lovac mina Weilheim i testni tim WTD 71/Atlas Elektronik sudjelovali su i višenacionalnoj demonstraciji mogućnosti autonomnih podvodnih plovila koje je u studenom 2005. održana u NATO-ovom Undersea Research Center (NURCA) u La Speziai (Italija). Glavni je cilj bio prikazati mogućnost uporabe komercijalnih autonomnih podvodnih plovila u obavljanju zadaća protuminske borbe. Prema tvrdnjama Atlas Elektronika SeaOtter Mk I je uspješno obavio tri glavne zadaće koje su se izvodile u područjima Tellaro i Levanto. Prva je zadaća bila u što kraćem vremenu na području 1,6 x 1,6 kilometara pronaći barem jednu minu. SeaOtter Mk I je uspio obaviti zadaću u relativno kratkom vremenu (u odnosu na druga autonomna podvodna plovila koja su sudjelovala u testiranju) od četiri sata.
Druga je zadaća bila u potpunosti očistiti području dužine 2,8 kilometara i širine 600 metara. Zbog toga je u zadanom području trebalo otkriti, klasificirati i označiti sve mine.
Treća je zadaća obuhvatila testiranje mogućnosti ugrađenih senzora, s naglaskom na njihovim sposobnostima preciznog mapiranja terena i davanja realnih slika otkrivenih predmeta (mina). Mine su namjerno potopljene u posebno izazovna područja uključujući i osam metara visoku stepenastu stijenu. U toj zadaći SeaOtter Mk I je pokazao da je sposoban pretražiti kompletno područje za samo pet sati bez ikakve pomoći sa strane. Tijekom te demonstracije SeaOtter Mk I je obavio 19 misija u ukupnom vremenu od 21 sat i osam minuta, te je preplovio udaljenost od 123,4 kilometra. Operativnost mu je bila 95,5 posto.
SeaOtter Mk II
Na tim je osnovama tvrtka Atlas Elektronik odlučila razviti još naprednije autonomno podvodno plovilo SeaOtter Mk II. Novi će SeaOtter biti manji (3,45 m x 0,98 m x 0,48 m u odnosu na 4,5 m x 1,2 m x 0,6 m SeaOttera Mk I) i lakši (1100 kilograma u odnosu na 1500 kg prethodnika). Unatoč tome imat će više snage i moći će pod površinom ostati duže i preploviti veću udaljenost. Dobit će bolje sonare čiji je razvoj u Atlas Elektroniku pri kraju. SeaOtter Mk II će moći ploviti u rasponu brzina od nula do osam čvorova te će pod vodom moći ostati čak 24 sata uz “optimalnu brzinu plovidbe” od četiri čvora. Moći će djelovati u strujama brzine do tri čvora te na dubinama između pet i 600 metara. Vrijeme potrebno za pripremu plovila između dvije misije bit će jedan sat (ako bude se mijenjao kompletni modul s baterijama) ili četiri sata (ako se baterije pune pri naponu od 36 kWh). Osnovni navigacijski sustav bit će inercijalni MARPOS II kojeg će dopuniti s DVL Doppler brzinomjerom, naprednim GPS sustavom, CTD-om i senzorima za mjerenje pritiska. Uvest će se i posebne mjere provjere pouzdanosti svih sustava i računalnih programa kako bi se minimizirala mogućnost kvara ili pogreške i gubitka plovila. Moguća je ugradnja i nekoliko dodatnih navigacijskih podsustava, uključujući unatrag motreći sonar. Svi će ovi napori dovesti do vrlo precizne podvodne navigacije koja će imati odstupanje od samo 0,03 stupnja u odnosu na zadanu dužinu plovidbe kad se pretražuje područje i samo 0,1 posto kad se pretražiuje određeni pravac.
Standardna oprema za zadaće otkrivanja morskih mina za SeaOtter Mk II sastojat će se od Atlas Elektronikovog višeimpulsnog/višenamjenskog, vrlo preciznog bočno motrećeg sonara s visokom rezolucijom slike i Sonartech Atlas Fansweep 30 višeimpulsnog ehosondera. Veliki napredak ostvaren je ugradnjom mogućnosti prijenosa prikupljenih podataka sa senzora na brod i slanje uputa za nove zadaće dok je SeaOtter Mk II pod vodom (pomoću akustičkog modema koji radi u frekvenciji od 12 kHz) ili dok je plovilo na površini mora (pomoću bežičnog linka kapaciteta 2 Mbit/sekundi). Prijenos podataka iz plovila u zapovjedni centar broda obavljat će se pomoću Fast Ethernet sustava. SeaOtter Mk II imat će mogućnost djelovanja s modulima za opremu različitih dimenzija čime mu je bitno povećana prilagodljivost zadaćama. Trup broda činit će dva cilindra kojima će se moći promijeniti širina i dužina pomoću posebnih računalnih spojnica. Za SeaOtter Mk II razvijene su četiri različite konfiguracije sekcija srednjeg dijela trupa (koje sve imaju istu masu i središte gravitacije što je potrebno da bi se zadržao stabilitet plovila). Posebno je razvijen modul kojim će se na SeaOtteru Mk II moći prevoziti SeaFox plovilo za uništavanje podvodnih mina. Ta će kombinacija omogućiti da SeaOtter preveze SeaFox ronilicu u zonu djelovanja koja će potom uništiti minu ili obaviti neku drugu zadaću. SeaOtter Mk II će dobiti i novu generaciju računalnih programa za planiranje misija, uključujući i automatski sustav kontrole plovidbe. Program je razvijen na osnovi Atlas Elektronikovog programa Integrated Mine Countermeasures System kojim se, u programu modernizacije, trenutačno opremaju lovci mina belgijske, nizozemske i švedske ratne mornarice. To će znatno olakšati integraciju SeaOtter Mk II, autonomnih podvodnih plovila u zapovjedne sustave tih lovaca mina.
pripremio Tomislav JANJIĆ