Proces globalizacije čini države i društva međusobno ovisnima u mnogim svakodnevnim i dugoročnim djelovanjima pojedinaca,…
More – zaštitni medij podvodnim uljezima opasnih namjera
Tijekom razdoblja Hladnog rata pomorske prijetnje bile su uglavnom ograničene na područja dubokih mora Atlantskog i Tihog oceana, na kojima i u kojima su se desetcima godina tražile i pratile podmorske i površinske snage dvaju supersila

Nakon rušenja Berlinskog zida “vruća” područja premještena su u toplija i plića mora blizu obala “nepokornih” država, oko većih ili manjih kriznih žarišta koje je trebalo nadzirati i pravodobno gasiti. Uz to, početkom trećeg tisućljeća širi se i raste opasnost asimetričnih ugroza u litoralnim vodama diljem svijeta, s posebnim obilježjima nepredvidljivosti u vremenu i prostoru, te načinu i intenzitetu djelovanja.
Pomak operativnih djelovanja pomorskih snaga s otvorenih pučina dubokih oceana u litoralna mora nametao je nužne promjene performansi oružja i senzora na površinskim i podvodnim plovilima, odnosno prilagodbu novom prirodnom i taktičkom okruženju. Naime, podvodna djelovanja su izrazito ovisna o čimbeniku prirodnog okruženja čija su svojstva u priobalnim vodama različita od mjesta do mjesta i promjenjiva iz dana u dan, a često iz sata u sat. Tu je more vrlo složeni medij s dinamičkom prirodom, koja je na neki način nalik vremenskim ponašanjima atmosfere, koje je teško predvidjeti ili obilježiti.
Skrivanje u podvodnim akustičkim sjenama
Za razliku od svježe (slatke) vode, more sadrži mnoge rastvorene kemikalije, uključujući karakterističnu sol (natrijev klorid). Drugo, dobro znano, obilježje podmorja je odgovarajući porast pritiska s povećanjem dubine. I drugi čimbenici, kao što su promjena saliniteta ovisno o udaljenosti od ušća rijeka, promjena temperature ovisno o dubini, potpovršinske struje, suprotne struje i valovi, učinci topografije i morskog dna, te postojanje makro i mikro organizama, utječu na optička i akustička svojstva mora koja su bitna za uspjeh ili neuspjeh podvodnih djelovanja. Naime, podvodni napadači i podvodni branitelji trebaju otkriti podvodni cilj, identificirati ga, locirati ga i tek potom mogu djelovati na odgovarajući način. No, otkrivanje objekata u moru znatno je neizvjesnije negoli površinskih objekata koje se radarima (i na druge načine) otkriva pouzdano i locira dosta točno.

More je medij slabo propusan za svjetlo i elektromagnetske valove, s izuzetkom plavo-zelenog svjetla i vrlo niskih radiofrekevencija. Jedino se zvučna energija može prostirati pod morem do razmjerno velikih udaljenosti koje se s porastom frekvencije smanjuju. Brzina zvuka u moru ovisi o kombinaciji temperature, pritiska i saliniteta. Prosječna brzina zvuka je oko 1450 m u sekundi, što je oko četiri puta brže od brzine zvuka u zraku.
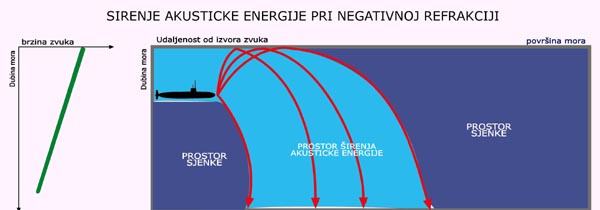
Zbog takvih svojstava, detekcija objekata pod morem temelji se, uglavnom, još uvijek na odašiljanju kratkih imuplsa zvučne energije u uskim snopovima kroz podmorska prostranstva, a posebnim akustičkim prijamnicima prisluškuju se eventualni odjeci tih impulsa od otkrivenih objekata te određuje njihov položaj. Na tom principu djeluju podvodni “radari”, za koje je usvojen enegleski naziv SONAR (Sound Navigation and Ranging). No, more zbog slojevite gustoće po dubini nepovoljno djeluje na prostiranje zvučne energije koja se ne širi pravocrtno, već se putanje prostiranja povijaju više ili manje, prema dnu ili površini ovisno o gradijentu promjene gustoće morskih slojeva. Osim toga, akustička energija se reflektira-raspršuje od površine mora i morskog dna, te u kombinaciji s izravnim lučnim putanjama nastaje tzv. konvergencija prostiranja zvučnih valova, zbog čega veliki volumeni morske vode ostaju nepokriveni zvučnom energijom iz određenog zvučnog odašiljača. Objekt u takvoj zvučnoj sjenci neće biti otkriven čak ni kada je vrlo blizu odašiljača sonara.
Poznavanjem dugoročnih i kratkoročnih svojstava mora na određenom području, podvodni objekti mogu skriveno prići željenim pozicijama, prolazeći kroz područja zvučnih sjena. Zaštićene takvim svojstvima mora, u hladnoratovskom razdoblju male i patuljaste podmornice ulazile su u tuđa teritorijalna mora i prilazile zaštićenim zonama i objektima, obavljajući izviđanja ili neke druge zadaće, primjerice skrivena iskrcavanja špijuna, postavljanja podmorskih mina ili nekih prislušnih podvodnih sustava u podmorja država suprotnog bloka. Većina se neprimijećeno vraćala u njihove baze, što je posebno bilo izraženo u Baltičkom moru i Sredozemlju, ali i na drugim lokacijama diljem svijeta.
Strateške nuklearne podmornice velikih sila nisu djelovale u plitkim i uskim litoralnim morima, već pretežno u dubokim oceanima, gdje su mogle krstariti mjesecima skrivene morskom vodom i akustičkim sjenama.
Zasjede podvodnim uljezima
Oba bloka su u tom razdoblju, uz razvoj strateških podmornica, razvijala i strateške sustave podvodnih senzora uz pomoć kojih su pokušavali otkrivati i pratiti podmornice druge strane. Proizvedene su različite prislušne mreže-barijere s pasivnim zvučnim senzorima-hidrofonima, koje su se polagale na dno bitnih pomorskih tjesnaca i takozvanih nadzornih točaka čije su pozicije bile strateški kritične za vodeće blokovske sile. Pasivnim senzorima prisluškivali su se zvukovi podmornica (strojevi u podmornici, hidrodinamički šum, propeler podmornice), s posebnim spektralnim obilježjima za svaki tip podmornice, po kojima su se one mogle prepoznati. Digitalni računalni sustavi s moćnim algoritmima mogli su prepoznavati i izdvajati zvuk podmornice, površinskog broda, torpeda ili ronioca te eventualno prepoznati točno određeni objekt, uz pretpostavku da su već ranije snimljeni njegovi svojstveni zvukovi i pohranjeni u bazu podataka pasivnog sustava podvodnog motrenja.
Primjerice, američki sustav fiksnih podvodnih nizova pasivnih akustičkih senzora SOSUS (Sound Surevillance System) bio je u operativnoj uporabi već 1955. na područjima sjevernih dijelova Atlantskog i Tihog oceana. U projektnoj zadaći bilo je zamišljeno da SOSUS otkriva zvukove prvog naraštaja sovjetskih nuklearnih podmornica, koje su bile vrlo bučne, na udaljenostima 50 do 500 nautičkih milja. Tijekom tridesetgodišnjeg djelovanja taj sustav je bio poboljšavan tehnološki i softverski, što je pridonosilo povećanju dometa detekcije i većoj pouzdanosti identifikacije podmornica.
Nešto kasnije, 1984. razvijen je manji podvodni sustav pasivnog motrenja za plića mora naziva FDS (Fixed Distributed System). FDS je činio linearni niz (linija) hidrofona s prislušnim snopovima usmjerenim prema površini, i to s pet hidrofona u nizu koji su međusobno udaljeni 13 nautičkih milja. Po tri takve linije fiksirane na morskom dnu i međusobno udaljene 50 nautičkih milja, tvorile su barijeru na određenim kritičnim područjima najvjerojatnijeg prolaza podmornica-uljeza. Ti nizovi i hidrofoni povezani su optičkim kabelima na obalnu nadzornu postaju. Vjerojatnost detekcije podvodnih objekata sustavom FDS bila je znatno veća negoli sustavom SOSUS, no volumen motrenja FDS-a je manji od SOSUS-ovog.
Tehnološkim smanjenjem akustične zamjetljivosti nuklearnih podmornica, a i završetkom podvodnih igara “mačke i miša” devedesetih godina prošlog stoljeća, prestajala je postupno i svrha postojanja strateških sustava podvodnog motrenja i praćenja dalekih objekata u svjetskim oceanima.
Litoralna mora i podvodne prijetnje
Od tada je pozornost usmjeravana prema plićem priobalnom moru i manjim objektima u njemu, kao što su male dizel-električne podmornice, mala autonomna plovila bez posade, male ronilice za jednog ili dva čovjeka, torpeda, ronioci, ležeće ili lebdeće mine i sl. Takvi objekti podvodnih prijetnji raspoloživi su na otvorenim i crnim tržištima diljem svijeta, danas više nego ikada.
Mnogo manjih podmornica bivšega SSSR-a različitih tipova kupile su upravo države u sadašnjim i potencijalnim kriznim područjima. Na svjetskom tržištu u znatnom je porastu i ponuda malih, tzv. patuljastih podmornica, s posadom ili bez posade, niske zamjetljivosti koje je teško otkriti, a koje mogu biti vrlo djelotvorne i protiv moćnih objekata u moru, na površini ili na obali.
Pomorske mine raspoložive su za prodaju u velikim količinama već odavna. U dubokim vodama to oružje nije baš učinkovito, međutim, u obalnim i međuotočnim morima one predstavljuju opasnu prijetnju.
Prijetnje podmornicama i drugim podvodnim plovilima ubojitih mogućnosti te pomorske mine izrazite su manifestacije asimetričnih prijetnji. Napori nužni za neutralizaciju tih prijetnji znatno nadilaze uloženi trud za njihovo kreiranje.
Uz konstantni razvoj novih tehnoloških rješenja za zaštitu pojedinih površinskih platformi od podvodnih prijetnji, posljednjih godina znatno raste zanimanje za vođenje podvodnog ratovanja temeljeno na načelu centralizirane mreže (Network Centric Warfare, NCW). U centraliziranom i umreženom konceptu vođenja protupodmorničkog ratovanja, sliku podvodne situacije ne stvaraju informacije samo s jedne platforme, već se ona oblikuje na temelju kombinacije i stapanja informacija iz mnogih različitih senzora razmještenih na velikom području operativnih djelovanja. To mogu biti brodski podvodni senzori (ugrađeni sonar, tegljeni pasivni niz, aktivni tegljeni sonar), senzori na morskom dnu (pojediničani hidrofoni ili nizovi hidrofona), podvodna plovila bez posade (Unmanned Underwater Vehicles, UUV), daljinski upravljana plovila (Remotely Operated Vehicles, ROV) ili autonomna podvodna plovila (Autonomous Underwater Vehicles, AUV), radioakustičke plutače, avionski senzori (radari SAR, infracrvene kamere), helikopterski dubinski sonari, podmornički sonari i drugo. Stapanje informacija iz takvih senzora različitih tipova, pa i onda kad se rabe senzori samo jedne vrste, u jedinstvenu sliku podvodne situacije na određenom operativnom području nije jednostavna zadaća, te zahtijeva uključivanje mnoštva tehnoloških rješenja koja će to omogućiti.
Podvodne senzorske mreže zaustavljaju uljeze
Stacionarni podvodni senzori su najprihvatljiviji način kontinuiranog nadzora širokog područja litoralnog mora jer stupanj razvoja staklo-optičke tehnologije omogućuje motrenje do velikih udaljenosti uz zanemarive gubitke, s robustnim sustavima koji jamče visoku pouzdanost i trajnost senzora razmještenih po morskom dnu.
Podvodna prostranstva teritorijalnog mora i unutrašnjih morskih voda izložena su stalnoj opasnosti asimetričnih napada, bez obzira na trenutni status međudržavnih odnosa: rat, kriza ili mir, stoga ih treba neprekidno nadzirati, isto kao i morsku površinu iznad tih područja. U plitkim priobalnim vodama mnogih primorskih država nadziru se, uz pomoć pjedinačnih senzora ili nizova/mreža senzora, mikro područja, kao što su prilazi i ulazi u luke, prilazi posebnim zaštićenim pomorskim zonama, prometno važni tjesnaci i plovni putovi kroz uska mora, sidrišta (tankera, putničkih i trgovačkih brodova), naftne i plinske platforme i tome slično. U razmjerno plitkim vodama takvi senzori će detektirati i vrlo male objekte pod morem (ronici), ali i zvukove malih gumenih brodica na površini. Visoka vjerojatnost otkrivanja tako malih objekata na površini može se postići kombinacijom podvodnih akustičkih odjeka i površinskih radarskih odraza od istog objekta, koji se fuziraju u nadzornoj postaji na obali.
Sva djelovanja u petlji pomorske zaštite litoralnog mora, obale i luka mogu i moraju početi otkrivanjem opasnih uljeza ili opasnih situacija na moru uz pomoć sustava danonoćnog motrenja morskih dubina, morske površine te niskog volumena prostora iznad nje. Sinergizmom dvaju motrilačkih mreža, nazovimo ih “obala” za površinsko motrenje i “podmorje” za podvodno motrenje, moguće je djelotvornije razotkriti i spriječiti opasne uljeze koji bi se eventualno pokušali zaštititi morskim medijem na prilazu njihovim potencijalnim ciljevima.
Teroristički napad malim čamcem punim eksploziva na američki razarač USS Cole (DDG 67) u jemenskoj luci Aden 12. listopada 2000. upozorio je na široke mogućnosti asimetričnih pomorskih prijetnji. Taj napad je bio katalizator sveobuhvatnih nastojanja zaštite brodova i luka diljem svijeta. Na međunarodnoj konferenciji članica Međunarodne pomorske organizacije IMO, u Londonu prosinca 2002., usvojen je Međunarodni kodeks za zaštitu brodova i luka – ISPS (International Ship and Port Facility Security Code). Svrha tog Kodeksa je uspostavljanje standardiziranih i konzistentnih okvira za procjenu rizika od mogućih asimetričnih opasnosti, kojima se omogućuje državama ugovornicama da određenim tehničkim i organizacijskim zahvatima smanje ranjivost brodova, luka i lučkih objekata, odnosno da ojačaju njihove zaštitne mehanizme u skladu s povećanim prijetnjama prema njima.
Sve članice, pa i Hrvatska, trebale su izraditi planove zaštite luka do početka srpnja 2004. U planovima zaštite hrvatskih luka otvorenih za međunarodni promet znatan dio trebao bi biti posvećen sustavima motrenja i nadzora morske površine i podvodnog prostora na prilazima tih luka i u samim lukama. Predviđene sustave motrenja nužno je čim prije instalirati, jer samo ranim otkrivanjem prijetnje mogu se učinkovito razvijati procesi u petlji zaštitnih aktivnosti, počevši od odvraćanja i sprečavanja opasnosti do suzbijanja i elminiranja uljeza prije početka rušilačkih djelovanja na ciljane objekte u luci i oko nje.
Male brze sportske brodice ili mala podvodna plovila napunjena eksplozivom, upravljana daljinski ili navođena autonomnim sustavom (ili samoubojicom) na cilj pred lukom ili u luci, ubrajaju se u skupinu izrazitih opasnosti niske zamjetljivosti i visoke razorne učinkovitosti. Posebno su opasni ronioci i plivači, koji su u prošlosti bili ignorirani, odnosno nisu bili tretirani kao ozbiljna prijetnja. No, samo jedan terorist-ronilac koji nosi razmjerno jeftin eksploziv mogao bi znatno oštetiti usidreni ploveći hotel sa stotinama putnika ili zapriječiti ulaz u neku vrlo prometnu luku.

Mnoge tvrtke diljem svijeta razvijaju i nude pojedinačne podmorske senzore, (aktivne i pasivne) ili senzorske mreže posebno kreirane za određena mikropodručja, uz pomoć kojih se pouzdano detektiraju i prepoznaju prije spomenute podvodne opasnosti niske zamjetljivosti, što je osobito važno u predlučkim vodama niske prozirnosti gdje nadzorne podvodne TV kamere nisu uvijek djelotvorne.
Primjeri podvodnih sustava za otkrivanje uljeza niske zamjetljivosti
U engleskom poduzeću “QuinetiQ”, s dugogodišnjim iskustvima njihovih stručnjaka na istraživanju tehnologija aktivnih i pasivnih sonara za otkrivanje mina, torpeda, podmornica i ronilaca, razvijen je sonar za detekciju plivača/ronioca nazvan CERBERUS (iz grčke mitologije mnogoglavi pas Kerber, čuvar podzemlja). CERBERUS se može rabiti kao pojedinačni senzor za zaštitu broda, kada spušten preko boka u more motri podmorje u krugu 3600.
Za nadzor luka i tjesnaca CERBERUS-i se postavlju na morskom dnu u nizu, tvoreći zaštitni kordon, odnosno podvodnu barijeru. Senzori i signalprocesori sustava CERBERUS povezani su kabelima do konzole pokazivača u obalnoj nadzornoj postaji. Ako se u motrenom volumenu podmorja pojavi neki objekt-uljez, generira se signal upozorenja. Sustav određuje položaj otkrivenog objekta te ga uzima u praćenje, i to kroz vrlo složene uvjete morskog okruženja. Naime, česta je “zagađenost” mora u predlučkim i lučkim područjima mnoštvom drugih zvukova iz različitih poznatih, “standardnih” izvora, koje moćni algoritmi CERBERUS-a mogu prepoznati i eleminirati iz daljeg procesa obrade.
CERBERUS je aktivni, širokopojasni motrilački sonar visoke rezolucije, radne frekvencije 100 kHz, s visokodefiniranom slikom otkrivenog objekta na zaslonu konzole pokazivača.
CERBERUS može biti proširen i opcijama: a) aktivnim sonarom frekevencije 300 kHz, b) sustavom pasivnog motrenja, na nižim frekvencijama, u opsegu od 2 kHz do 8 kHz, što omogućuje detekciju prijetnje (zvukova) na većoj udaljenosti, odnosno pruža više vremena za učinkovitu reakciju prema prijetnji.
Tijekom ispitivanja pojedinačnog CERBERUS-a u plitkom moru, otkrivani su ronioci/plivači na udaljenosti 700 metara. Uz pomoć više senzora povezanih u dobro organiziranu barijeru, domet otkrivanja ronilaca povećan je na oko 1000 metara.
Odjek signala CERBERUS-a detaljno se analizira, što omogućuje prepoznavanje, čak, šupljine ljudskog prsnog koša na udaljenosti oko 500 metara. Takva identifikacija, odnosno razlikovanje šupljina prsnog koša čovjeka i ribe, vrijedna je informacija u morima s organizmima veličine čovjeka (dupini, morski lavovi i sl.), kako bi odjeci od njihove eventualne detekcije bili prepoznani i eleminirani iz daljnje obrade.
Njemačka tvrtka Atlas Elektronik GmbH proizvodi podvodne stacionarne sustave za nadzor obalnog područja i zaštitu luka. Sustav ASES (Active Sonar for Entrance Surveillance) je neusmjereni sonar (motri krug 360 stupnjeva) projektiran za detekciju podmornica, patuljastih podmornica i ronilaca. Uskim snopovima zračene akustičke energije (elektronički upravljanim) ASES pretražuje motreni volumen i po dubini, što omogućuje određivanje dubine otkrivenog objekta, uz izmjereni azimut (točnost 2 stupjna) i udaljenost (točnost 1%). Operator može birati jedno od sedam instrumentalnih područja udaljenosti od 100 do 2000 metara. Maksimalna radna dubina ASES-a je 100 m.
Sustav ASES čine senzorski sklop na morskom dnu i nadzorni sklop smješten u postaji na obali. Senzorski sklop sadrži glavu sonara s ugrađenim elektroničkim sklopovima te cilindrične odašiljačke i prijamničke akustičke nizove.
U nadzornoj postaji je konzola operatora s dva zaslona veličine 19 inča, visoke rezulucije, tzv. raster scan u boji, na kojima se prikazuje taktička slika i akustička analiza.
Podaci o “uhvaćenim” jekama prenose se iz podvodne glave sonara preko optičkog kabela do nadzornog sklopa.
Sustav može raditi u dva režima: ručnom i automatskom. U automatskom režimu sustav kontinuirano monitorira ambijentlani šum i reverberacije u određenom području, osiguravajući tako trenutačnu detekciju dolazećeg objekta-uljeza, njegovu klasifikaciju i praćenje s povijesnim tragom prevaljenog puta te klasifikacijskim simbolom i brojem uljeza na zaslonu operatora, uz aktiviranje vizualnog i zvučnog alarma.
U ručnom režimu, operator raspolaže visokosofisticiranim alatima za analizu otkrivenog odjeka. On može upravljati razinom snage odašiljača i režimom odašiljanja (FM/CW, dužina impulsa), pragom detekcije, režimom skeniranja, klasifikacijskim podacima i dr.
Atlas Elektronik je proizveo i sustav APSS (Atlas Port Surverillance System) za permanentno monitoriranje podvodne scene u lučkim područjima u svrhu zaštite od prikrivenih napada plivača i malih brodica. Ovaj aktivni sonar proizveden je posebno za plitka mora do dubina 40 m i područja s vrlo gustim pomorskim prometom. APSS otkriva plivače/ronioce na udaljenosti oko 1000 m. Podvodne komponente sustava su konstruirane za dugotrajnu podvodnu instalaciju bez pokretnih dijelova, uz neznatne radnje njihova tekućeg održavanja.
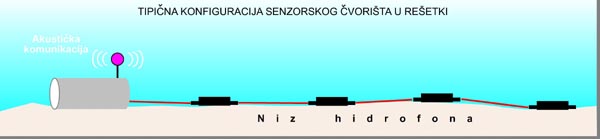
Američka tvrtka UnderSea Sensor Systems, Inc., u sastavu poduzeća Ultra Electronics (prije toga u sastavu Magnavox Marine Systems Operation, zatim je kratko bio dio Huges Aircrafta, te Raytheona) razvila je sustav podvodnog motrenja distribuiranom rešetkom pasivnih senzora na morskom dnu, organiziranoj na načelu centralizirane mreže, u kojoj se informacije iz svih pojedinačnih senzora na određenom području stapaju u središnjoj točki prema korisniku. Obrada podataka i izvješćivanje iz rešetke obavlja se autonomno u relanom vremenu.
Rešetka senzora sadrži veći broj senzorskih čvorišta, s nizom senzora-hidrofona priključenim na svakog od njih. U svakom čvorištu je procesor i sklop za komunikaciju među čvorištima i sa središnjom radioakustičkom plutačom. Svako čvorište autonomno procesira digitalizirane električne signale iz hidrofona, koji su proporcionalni zvučnoj energiji koju hidrofon “čuje” iz nadziranog volumena mora. Procesor otkriva prisustvo objekta, određuje njegov položaj te prati zanimljive objekte. O otkrivenom objektu (kontaktu) čvorište informira ostala čvorišta u rešetki i središnju točku preko podvodne akustičke komunikacije. Sva čvorišta jedne senzorske rešetke komuniciraju sa središnjom radioakustičkom plutačom u svrhu postizanja što učinkovitijeg sinergizma, odnosno pouzdanije detekcije određenog objekta s više senzora.
Paket senzorskog čvorišta s pripadajućim hidrofonima baca se u more s broda ili aviona (ili na drugi način) na željenu lokaciju. Paket se u vodi automatski otvara i rasprostire se niz hidrofona vezanih na čvorište, tone na morsko dno i počinje funkcionirati. Konfiguracija niza može biti izvedena u različitim oblicima, od ravnih do prostornih, no najčešće se senzori rasprostiru po ravnoj crti, u takozvanom kolinearnom rasporedu. To je pouzdan i učinkovit raspored kojim se postiže znatno poboljšanje “hvatanja” zvukova.
Središnja radioakustička plutača prenosi podatke iz senzorske rešetke do avionske/brodske/satelitske ili obalne radio mreže, te od njih prima i prenosi podatke do senzorske rešetke. Radioplutača se sastoji od dva dijela: a) plutajućeg na površini, u kojemu su smješteni radioodašiljač (VHF ili UHF) i radioprijamnik (puni duplex na VHF ili UHF), procesor, baterije i radioantena (vertikalno ili kružno polarizirana) te b) podvodnog dijela s hidrofonom (prima akustičke podatke iz rešetke) i projektorom (odašilje akustičke podatke prema rešetki), koji je spušten ispod morske površine.
Kada se predviđa dugotrajno djelovanje autonomne distribuirane rešetke senzora na određenoj lokaciji, radioakustičku plutaču sidri se za morsko dno.
Integriranje i sinergizam mreža “more”, “obala” i “podmorje”
Petlja zaštite litoralnih mora bit će potpuno djelotvorna, bez “propusnih rupa”, tek kada se, uz postojeće i djelotvorne motrilačke mreže “more” (daleko motrenje površine i niskog zračnog prostora) i “obala” (blisko motrenje površine), uvede i nadzor podvodnih prilaza unutrašnjim morskim vodama, predlučkim i lučkim područjima izgradnjom treće motrilačke mreže “podmorje”.
“Eksplozija” razvoja i proizvodnje različitih vrsta malih podvodnih plovila, upravljanih i autonomnih, ronilačke i druge opreme za opasna podvodna djelovanja prema litoralnim morima i u njima, omogućila je vrlo siguran podvodni prilaz do najdubljih i najskrivenijih kutaka obale svim uljezima opasnih namjera.
Motrenje i nadzor objekata samo na površini mora i iznad nje mrežama “more” i “obala”, predstavlja samo dio motrilačkih zadaća, i to onih nadvodnih, dok kroz širom otvorena i nenadzirana vrata morskih dubina mogu proći nepozvani “gosti”, dobro skriveni morskim medijem i nezapaženo djelovati ispred “nosa” obalnih zaštitara.
Dakle, samo komplementarnim motrenjem nadvodnih i podvodnih prostranstava mrežama “more”, “obala” i “podmorje”, te njihovim integriranjem u jednu centraliziranu mrežu s glavnim središtem u kojemu će se stapati svi podaci o otkrivenim objektima, postiže se maksimalni sinergistički učinak i čvrsto se zatvaraju podvodna, površinska i nadvodna “vrata” opasnim uljezima svih vrsta i veličina.
________________________________________
LITERATURA
1. Marvin Leibstone “Combating Terrorism at Sea”, Naval Forces 6/2000
2. Dr. Norman Friedman “Homeland Defence – what can we do to protect our coasts and harbours?”, Naval Forces 3/2003
3. Rear Admiral Jens-Volker Kronisch “Conventional submarine operations in the 21st century”, Naval Forces, special issue Subcon 2003
4. “MCM, a new approach”, Naval Forces 5/2003
Vili KEZIĆ