(Foto: Boeing / David Torrence) Švedski Saab objavio je 18. rujna da će, pobijedi li…
Nenadzirani kopneni senzori
Upotreba daljinski upravljanih pasivnih senzora u vojnim operacijama postala je nakon nekoliko desetljeća slabe zastupljenosti popularnija. Napredak u digitalnoj obradi signala potaknuo je nastanak bržih, manjih i energetski štedljivijih računalnih čipova, pomoću kojih se mogu izvršavati iznimno složeni algoritmi u realnom vremenu. Senzori su stoga postali manji, ali i mnogo precizniji i sofisticiraniji

Tehnološki napredak je omogućio razvoj naprednih, višesenzorskih nenadziranih kopnenih senzora (engl. unattended ground sensors, dalje u tekstu UGS). Nenadzirani kopneni senzori mogu biti raznih veličina i oblika, sadržavati nekoliko senzorskih tehnologija. Mogu se postaviti na razne načine i izvješćivati o različitim vrstama ciljeva. Sastoje se od raznolikih senzora koji su otkrivanju udaljenih ciljeva, njihovu lociranju i/ili prepoznavanju. Idealni UGS su mali, jeftini, robusni i trebali bi operativno trajati duže razdoblje nakon postavljanja.
Takvi uređaji mogu se upotrebljavati u raznim zadaćama koje uključuju obranu kruga nekog objekta, nadzor granice, zahvat ciljeva, te za upotpunjavanje opće slike na terenu (situacijske svjesnosti). Mogu biti napravljeni tako da sami obrađuju informacije o cilju kao što su detekcija, procjena azimuta, praćenje, klasifikacija i/ili identifikacija, a mogu se upotrebljavati za izvješćivanje o nanesenoj šteti nakon djelovanja. Da bi se obavile tako raznolike zadaće UGS-a, mora se osigurati pravodobno slanje poruka natrag do zapovjedno-nadzornog središta (C2) putem sigurnih i robusnih komunikacijskih linija. Postizanje optimalnih performansi UGS-a ovisi o terenu, vremenu i procjeni pozadinske buke. Posebni računalni modeli upotrebljavaju se za predviđanje performansi i definiranje najboljih mjesta za postavljanje senzora.
Osnovna razmatranja
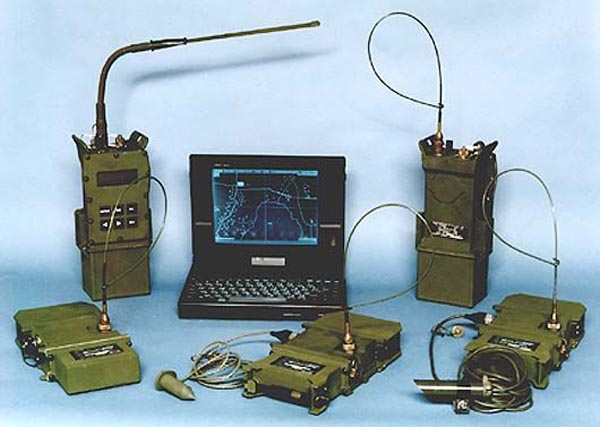
UGS sustav obično se sastoji od baterijom pokretanog jednog ili više senzora, a ima određenu sposobnost obrade podataka radi analize svojstava cilja i slanja podataka o prepoznavanju cilja udaljenoj postaji. UGS se može postaviti na mnogo načina: ručno, ispuštanjem s vozila, izbacivanjem iz zrakoplova, raspršivanjem pomoću topničkih granata ili raketa i drugim načinima. Prioritet je minijaturizacija i smanjenje cijene kako bi se omogućila njihova masovna uporaba te lako postavljanje. Topničko i zračno raspršivanje pred UGS-e i njihovu elektroniku postavlja dodatne zahtjeve prema robusnosti, otpornosti na udare i vremenske prilike. Kada se postave UGS-i se aktiviraju po zapovijedi.
Ciljevi od interesa za UGS u pravilu ovise o planiranoj zadaći. Na bojnom polju koriste se za otkrivanje ljudstva (vojnici u pokretu), raznih kopnenih ciljeva (jedno ili više vozila u konvojima), zračnih ciljeva (helikopteri, avioni, krstareće rakete, bespilotne letjelice) i paljbe (iz minobacača, topova, raketnih sustava, snajpera…).

Senzori ugrađeni u UGS većinom su pasivni akustički, seizmički, magnetski i infracrveni. Njihove performanse uvelike se poboljšavaju inteligentnim pakiranjem istih te samolociranjem i orijentacijom. Većina sustava objedinjuje najmanje dva različita senzora. Vjerodostojnu informaciju o cilju se može dobiti kroz fuziju informacija sa različitih senzora smještenih na istom UGS-u, a ujedinjavanje senzora na višim razinama, uključujući informacije sa različitih UGS-a može dodatno poboljšati učinak. Npr. objedinjavanje akustičnih, seizmičkih i infracrvenih signala može olakšati klasifikaciju i identifikaciju ciljeva, a ujedinjavanje informacija o azimutu s različitih UGS-a može poslužiti za triangulaciju i procjenu položaja cilja.
Seizmički senzori otkrivaju vibracije tla izazvane vozilima ili pješacima. Magnetni detektori prate kretanje metalnih objekata kao što su oružje i vozila. Akustički senzori otkrivaju ciljeve prema njihovim specifičnim zvučnim potpisima (buka motora, gusjenica, itd.), dok infracrveni senzori otkrivaju kretanje objekata u uskim poljima promatranja. Signali svih tih detektora se prikupljaju u izlaznom čvorištu (gateway) i obrađuju pomoću UGS-ova procesora. Kada se potpisi prepoznaju kao cilj, pokreće se alarm i informacija se automatski šalje radiom na središnju upravnu postaju kako bi se uzbunile snage na dotičnom području.
Uobičajeni UGS-ovi imaju ograničen domet otkrivanja i identifikacije ciljeva. Magnetski detektor može otkriti gusjenično vozilo na oko 25 m s 50% vjerojatnosti za točnu klasifikaciju, a seizmički ima veći domet od nekih 350 m s vjerojatnošću točne klasifikacije od 50 – 60 %. Akustički senzor može pratiti vozilo unutar kruga od 500 m i razlikovati kotačna od gusjeničnih vozila sa točnošću od 50 – 60 %. Zbog toga se pojedinačni UGS-ovi često postavljaju samo radi uzbunjivanja na nailazak vozila u određenom sektoru bez namjere da se razlikuje njegova pripadnost. Pa ipak, u određenim situacijama se od UGS-a očekuje ne samo da otkrije cilj, već i da ga identificira odnosno klasificira. Dok je na bojištu gusjenično vozilo od 60 tona vrlo vjerojatno tenk, kamion pun ljudi može prevoziti vojnike, radnike ili izbjeglice. Pitanje identifikacije postaje još složenije u slučaju pojedinačnih pješaka, posebice u urbanim okruženjima.
Verifikacija ciljeva zahtijeva dodavanje još jednog senzora da bi potvrdio informaciju. Ovo je obično slikovni senzor koji omogućuje da ljudski operater (man in the loop) identificira cilj pošto ga je uzbunio neslikovni senzor, a ako je izvedivo omogućuje i naknadno označavanje cilja.
Ograničeni dometi rezultiraju potrebom da se nekoliko UGS-a rasporedi u blizini jedan drugog da bi se osigurao kontinuirani nadzor otkrivenih ciljeva. Nekoliko umreženih senzorskih čvorišta može precizno identificirati ciljeve na bojištu. Dodatno, ona može izvoditi i važnu zadaću procjene štete prateći aktivnosti prije i nakon svakog napada.
Operativni život UGS-a može se bitno produljiti inteligentnim upravljanjem energijom i tako produžiti korisni vijek uređaja izvan roka trajanja kod normalnog kontinuiranog rada. Točnije rečeno, senzor može skenirati područje, tj. uključiti se svakih nekoliko sekundi trošeći tako minimum potrebne energije, a otkrivši cilj prelazi u kontinuiran način rada.
Ključ uspješne uporabe UGS-a je izdržljiva komunikacijska veza. poželjno bi bilo da frekvencijski pojas i snaga odašiljača budu mali. Za malu vjerojatnost presretanja i otkrivanja veze koriste se tehnike enkripcije i kompresije podataka.
Napredak u procesorskoj tehnologiji omogućio je UGS-ima vrhunsku obradu signala. No, zbog nestatične prirode signala, promjenjivih uvjeta okoline i raznolikosti ciljeva postoje granice uspješnog rada. Ključno je moći predvidjeti i kvantificirati svojstva senzora u različitim uvjetima. Prethodno znanje o vremenu i zemljištu ključno je u uspješnoj interpretaciji primjenjih podataka. Ovdje se mogu primijeniti i računalni modeli za podršku pri odlučivanju koji mogu osigurati statističke tolerancije za vrste informacija primljenih od svakog postavljenog UGS-a.
Sve navedeno odnosi se na UGS-e koji rade na baterije i namijenjeni su za prikrivene operacije. No, postoji potpuno drukčija skupina nenadziranih senzora koji se koriste skenirajuće senzore, uključujući elektrooptičke ili infracrvene i radare za nadzor kopna za kontrolu većih površina sa automatskim otkrivanjem pokretnih ciljeva. Takvi sustavi se obično koriste za nadzor kruga oko određenih objekata, nadzor granice i protuustaničke/urbane borbene primjene. Montiraju se na izdignutim platformama ili usidrenim balonima s ciljem maksimiziranja njihova dometa. Naravno, ovdje barem kada se radi o na kopnu postavljenim sustavima nema problema sa opskrbom energijom. Ovakvi skenirajući senzori se mogu koristiti za usmjeravanje daljinski upravljanih oružanih postaja postavljenih u blizini i tako omogućuju djelovanje po ciljevima koji se iznenada pojavljuju i brzo nestaju (time sensitive targets). Kada je potreban fleksibilniji odgovor, ovakvi sustavi mogu biti povezani sa autonomnim ophodnim vozilima ili ljudskim ophodnjama sa svrhom osiguranja brzog djelovanja.
Vedran SLAVER